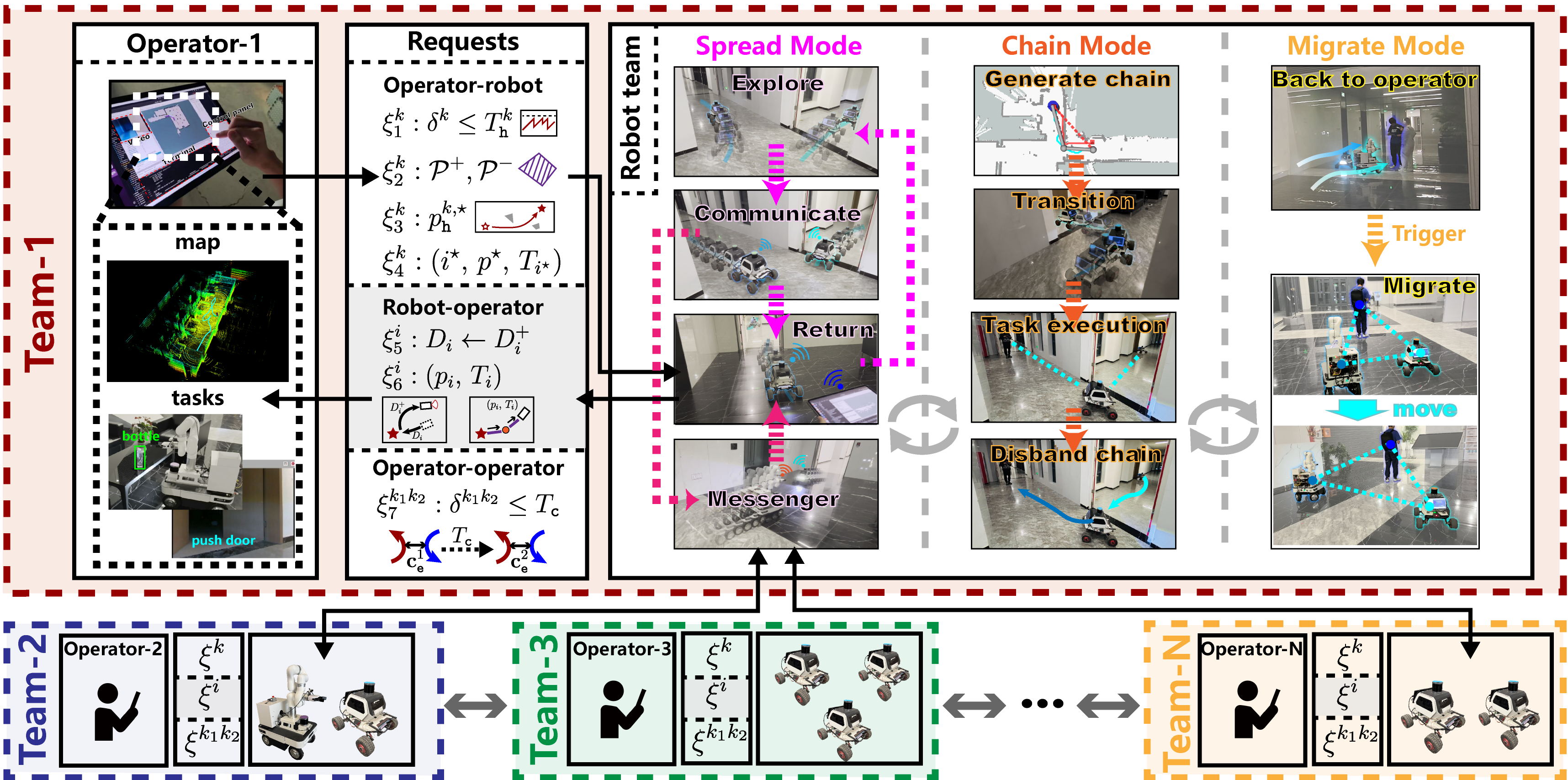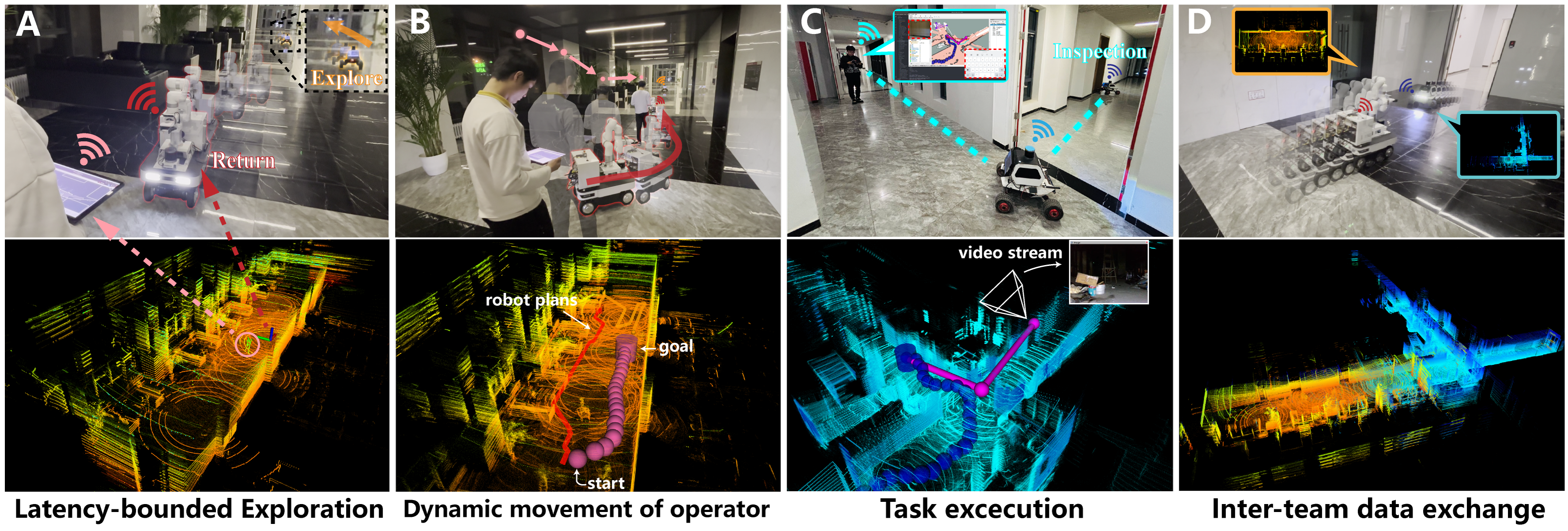
Fleets of autonomous robots are increasingly deployed with multiple human operators in communication-restricted environments for exploration and intervention tasks such as subterranean inspection, reconnaissance, and search-and-rescue. In these settings, communication is often limited to short-range ad-hoc links, making it difficult to coordinate exploration while supporting online human-fleet interactions. Existing work on multi-robot exploration largely focuses on information gathering itself, but pays limited attention to the fact that operators and robots issue time-critical requests during execution. These requests may require different communication structures, ranging from intermittent status delivery to sustained video streaming and teleoperation. To address this challenge, this paper presents MoRoCo, an online topology-adaptive framework for multi-operator multi-robot coordination under restricted communication. MoRoCo is built on a latency-bounded intermittent communication backbone that guarantees a prescribed delay for information collected by any robot to reach an operator, together with a detach-and-rejoin mechanism that enables online team resizing and topology reconfiguration. On top of this backbone, the framework instantiates request-consistent communication subgraphs to realize different modes of operator-robot interaction by jointly assigning robot roles, positions, and communication topology. It further supports the online decomposition and composition of these subgraphs using only local communication, allowing multiple requests to be serviced during exploration. The framework extends to heterogeneous fleets, multiple teams, and robot failures. Extensive human-in-the-loop simulations and hardware experiments demonstrate effective and reliable coordination under restricted communication.
@misc{tian2025morocomultioperatorrobotcoordinationinteraction,
title={MoRoCo: An Online Topology-Adaptive Framework for Multi-Operator Multi-Robot Coordination under Restricted Communication},
author={Zhuoli Tian and Yanze Bao and Yuyang Zhang and Meng Guo},
year={2025},
eprint={2508.07657},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2508.07657},
}